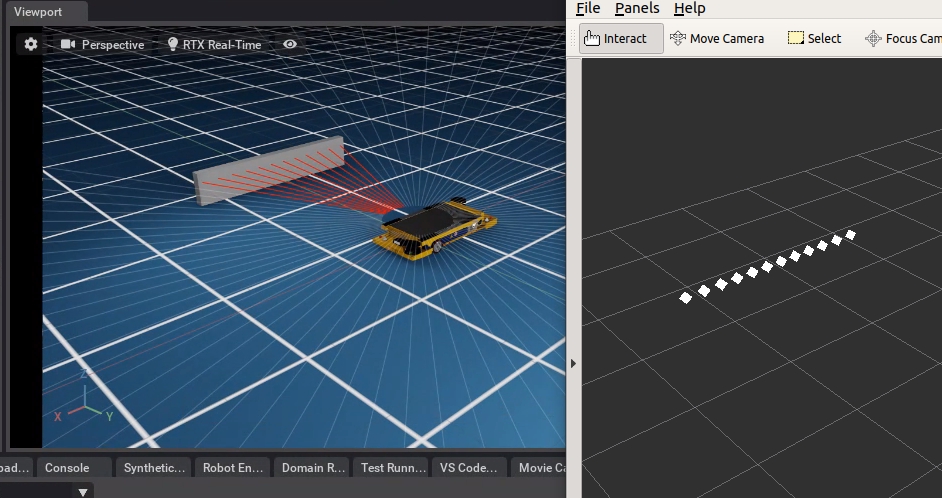
ROSとフォトリアルなシミュレーター「Isaac Sim」を連携させる 2D LiDARとAGVによる障害物検知。Isaac Sim(左)とRViz(右)での見え方の違い(クリックで拡大) 記事に戻る 富士ソフト,MONOist
{kind=link}