ROSとフォトリアルなシミュレーター「Isaac Sim」を連携させる
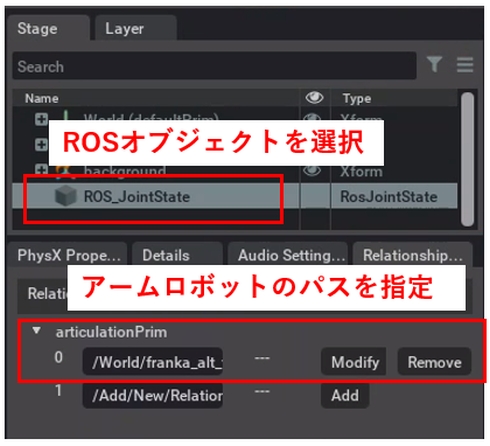
ROS_JointStateを選択し、アームロボットのパスを指定(クリックで拡大)
記事に戻る
富士ソフト,MONOist
{kind=link}