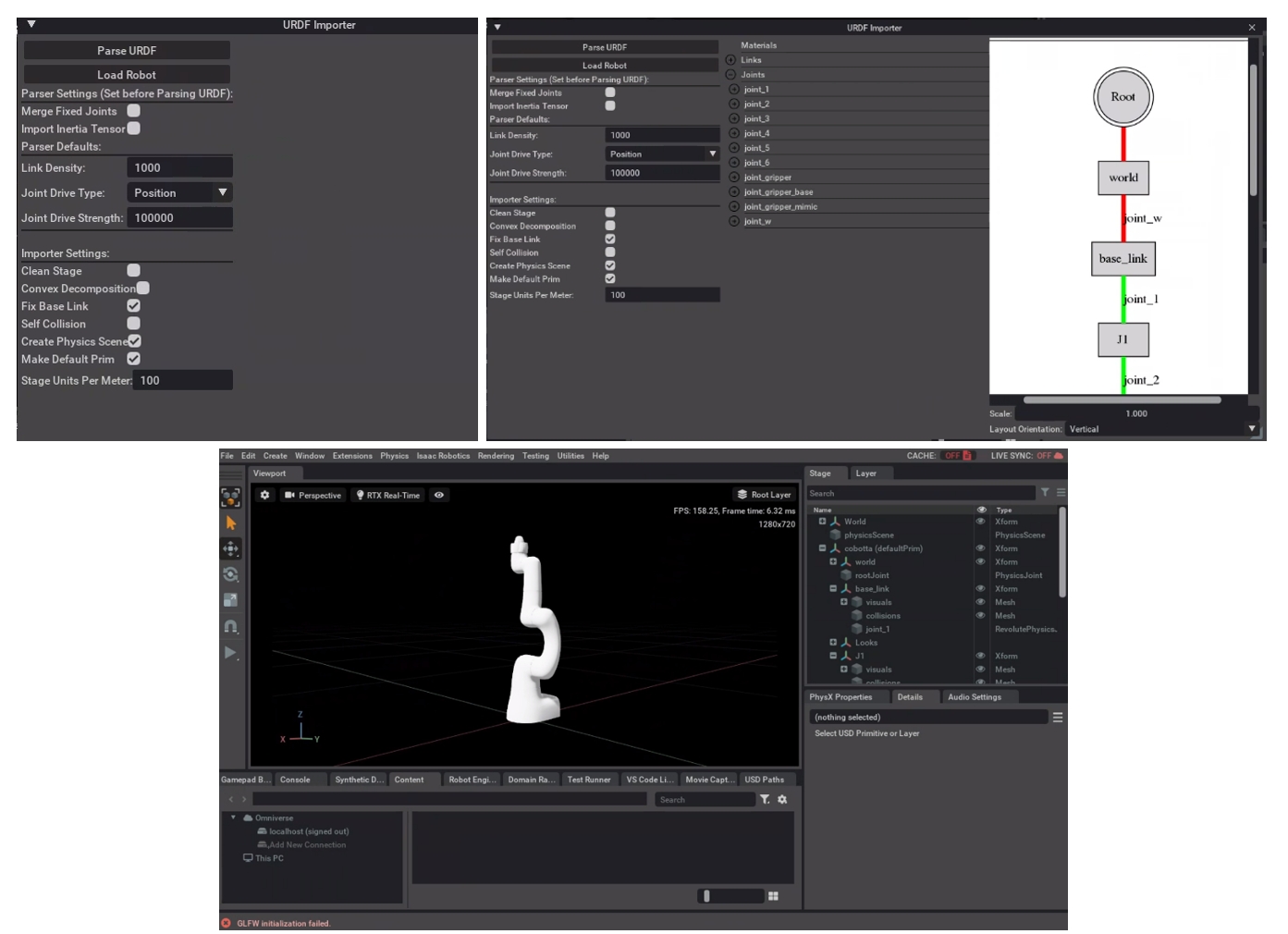
ROSとシミュレーターの連携が生み出す新たな可能性 URDF importerを使ってアームロボットのロボットモデルをIsaac Simに読み込める(クリックで拡大) 記事に戻る 富士ソフト,MONOist
{kind=link}