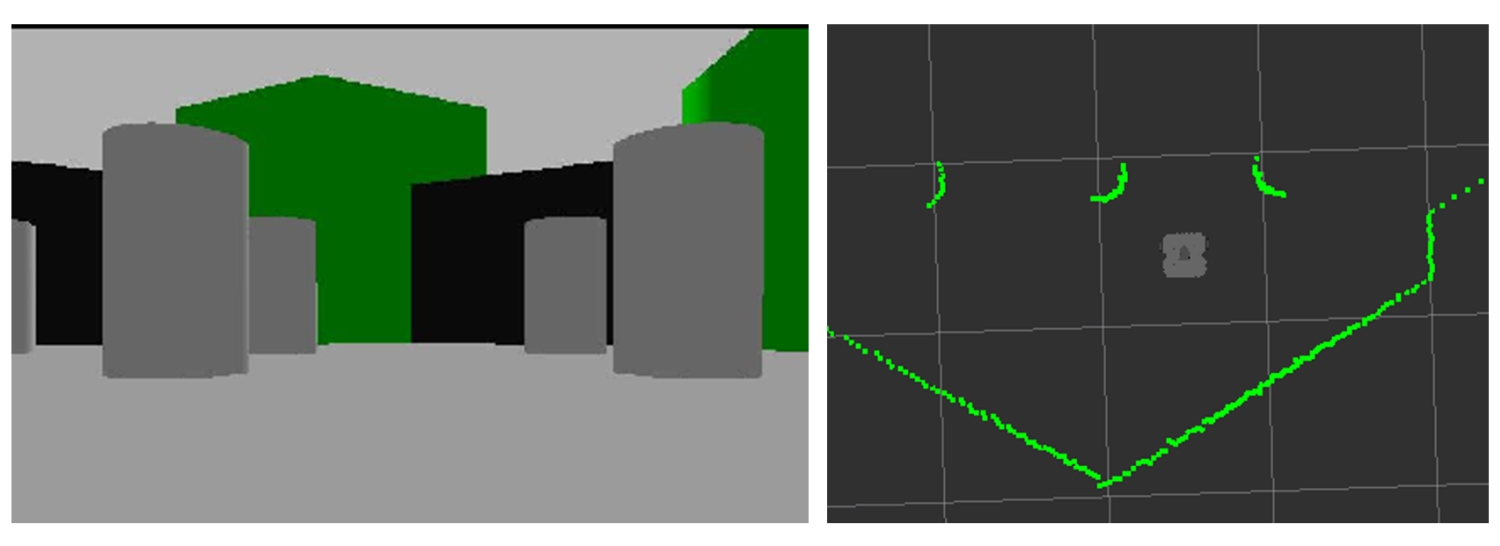
ROSとシミュレーターの連携が生み出す新たな可能性 Gazebo内におけるロボットに搭載されたカメラで撮影した画像(左)とロボットに搭載された測距センサーから得た距離情報(右)(クリックで拡大) 記事に戻る 富士ソフト,MONOist
{kind=link}