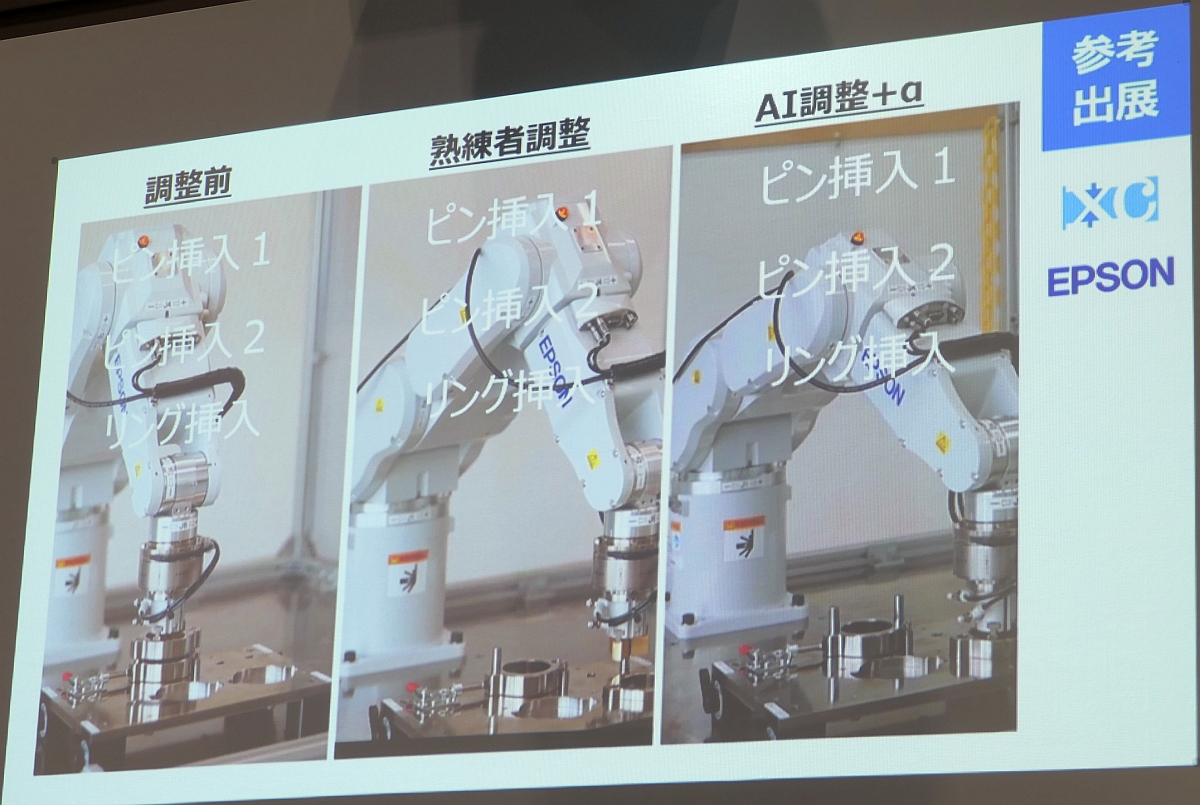
力覚センサー搭載ロボットのプログラミング、実機レス機械学習で最適化 調整前、熟練者による調整後、シミュレーション環境と機械学習の組み合わせによる調整後のサイクルタイムを動画で比較して見せた(クリックで拡大) 記事に戻る 朴尚洙,MONOist
{kind=link}