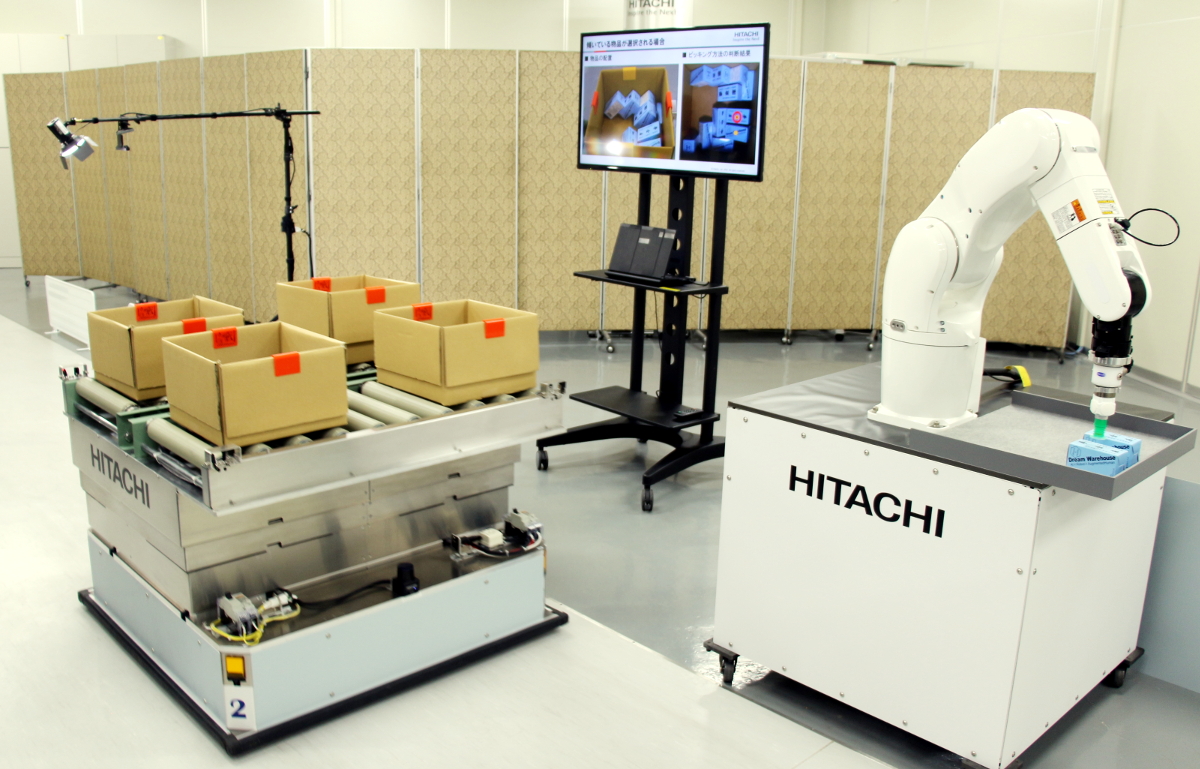
AI協調でロボットとAGVを連携、“動いたまま取る”で作業時間38%短縮へ 実証の様子。AGVが画面奥から部品を乗せて移動してくる。奥のカメラで部品を認識し、AIにより最適なピッキング部品と方法を選択。手前のロボットとAGVの速度を協調し減速することなくピックアップが可能となる(クリックで拡大) 記事に戻る 三島一孝,MONOist
{kind=link}