磁力で吸着し配管内面を自由自在にチェックするクローラー式点検ロボットを開発
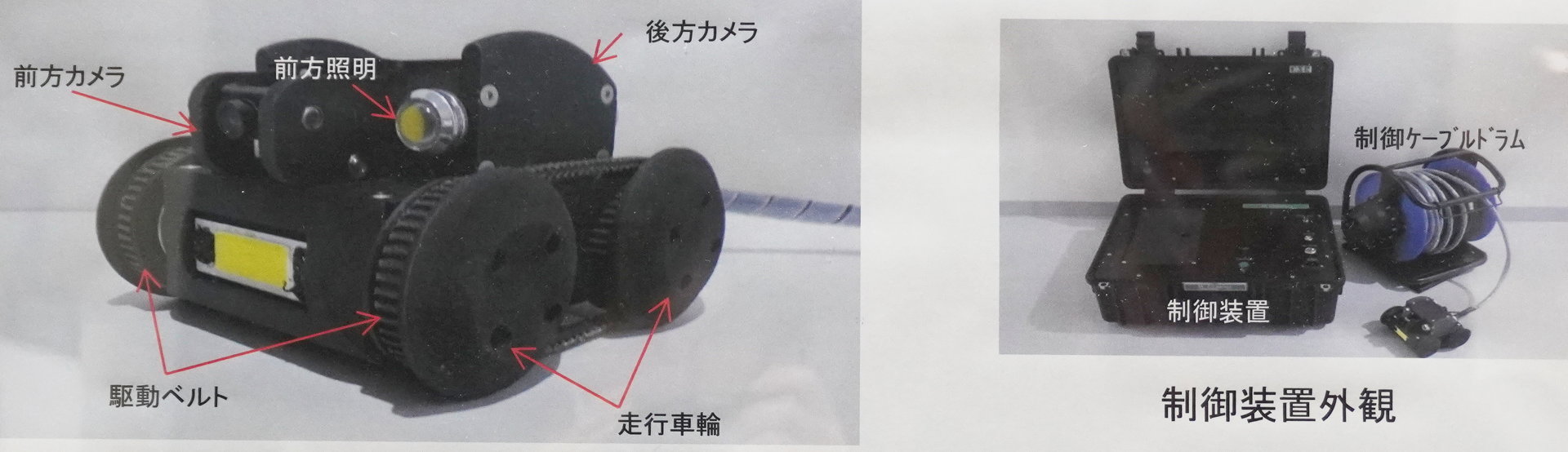
M2クローラーの搭載機器(左)と制御装置およびケーブルドラム(右)
記事に戻る
遠藤和宏,BUILT
{kind=link}