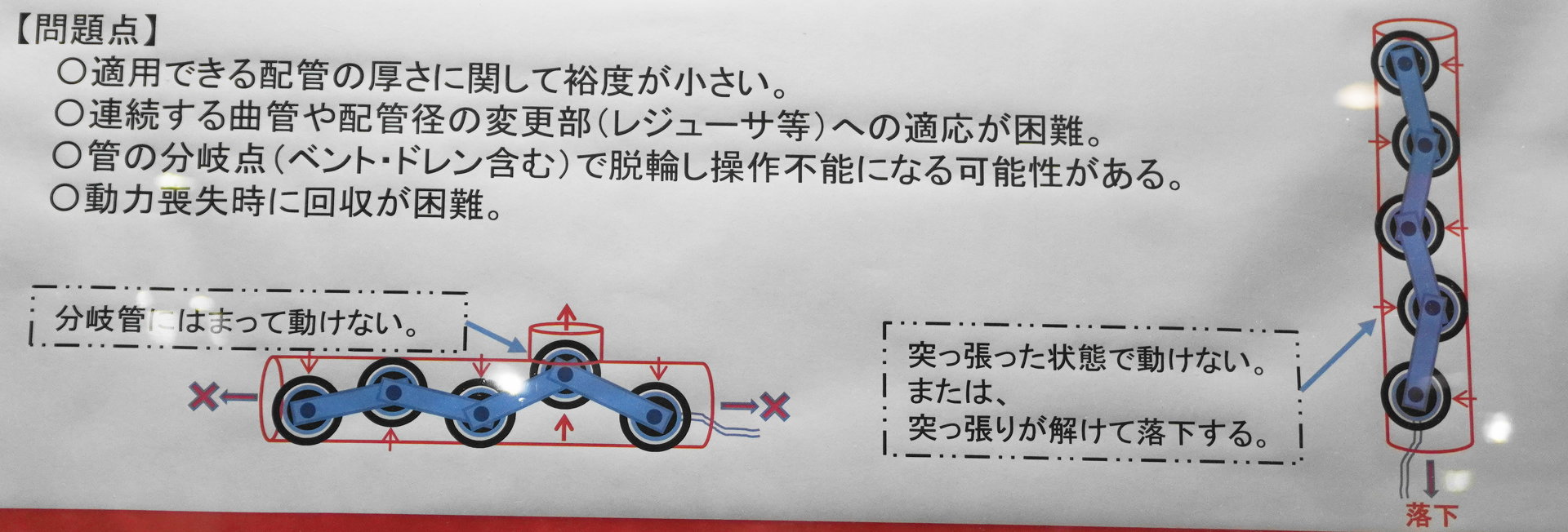
磁力で吸着し配管内面を自由自在にチェックするクローラー式点検ロボットを開発 分岐管にはまって(図内左)や突っ張った状態(図内右)で動けないといったこれまでの小口径点検ロボットが抱えていた課題 記事に戻る 遠藤和宏,BUILT
{kind=link}