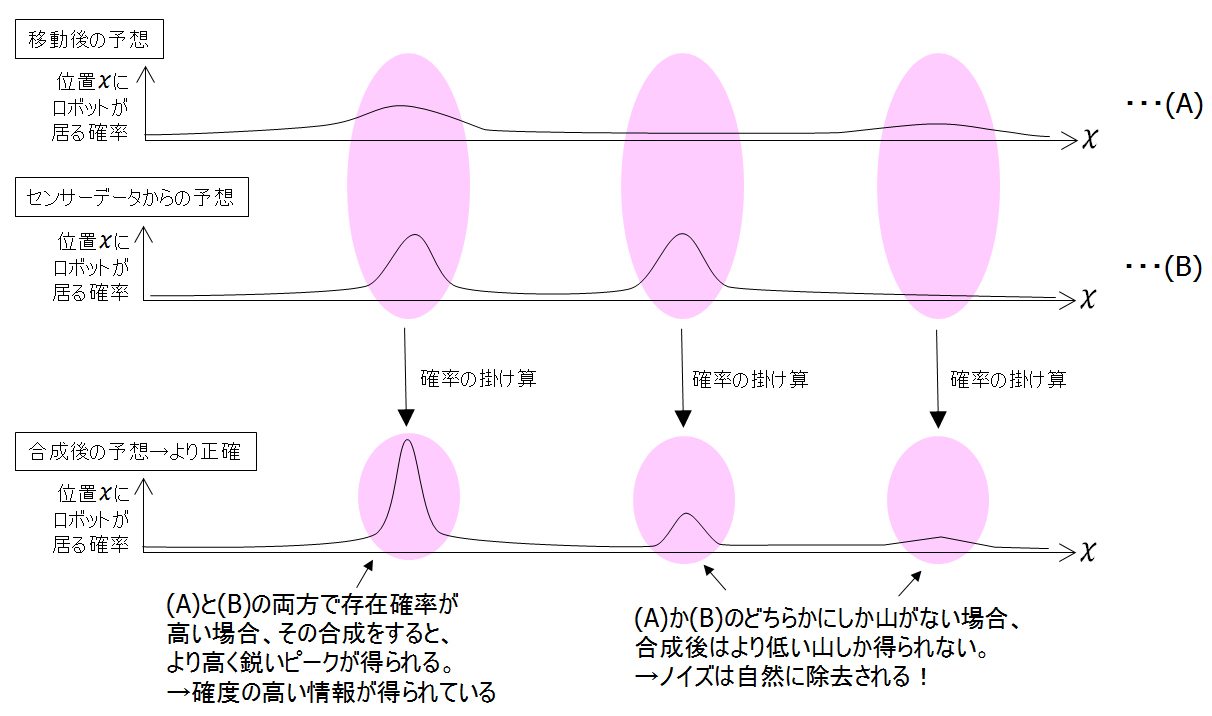
自動車を制御するロボットの思考と行動の仕組み――Google Carが現実世界を認識する際の3つのアルゴリズムと実用化への課題 新たなセンサーデータから算出した存在確率(B)と、行動後の車の存在確率(A)を合成 記事に戻る 近棟稔,ウルシステムズ
{kind=link}