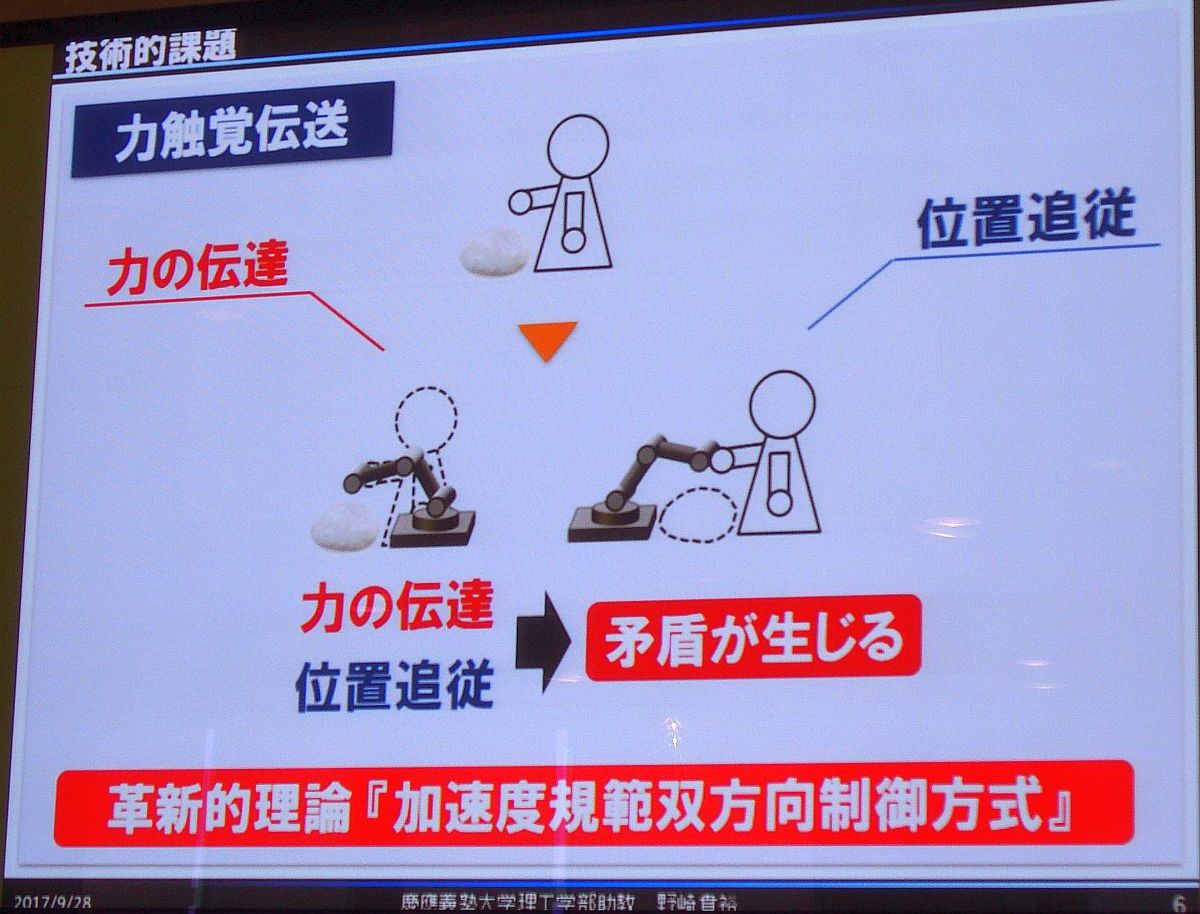
世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決 力制御と位置制御の特性は相反するのでそれらの両立は矛盾を抱えている(左)。慶應義塾大学の研究チームは革新的理論「加速度規範双方向制御方式」によってこの矛盾を解決したとする(クリックで拡大) 出典:慶應義塾大学 記事に戻る 朴尚洙,MONOist
{kind=link}