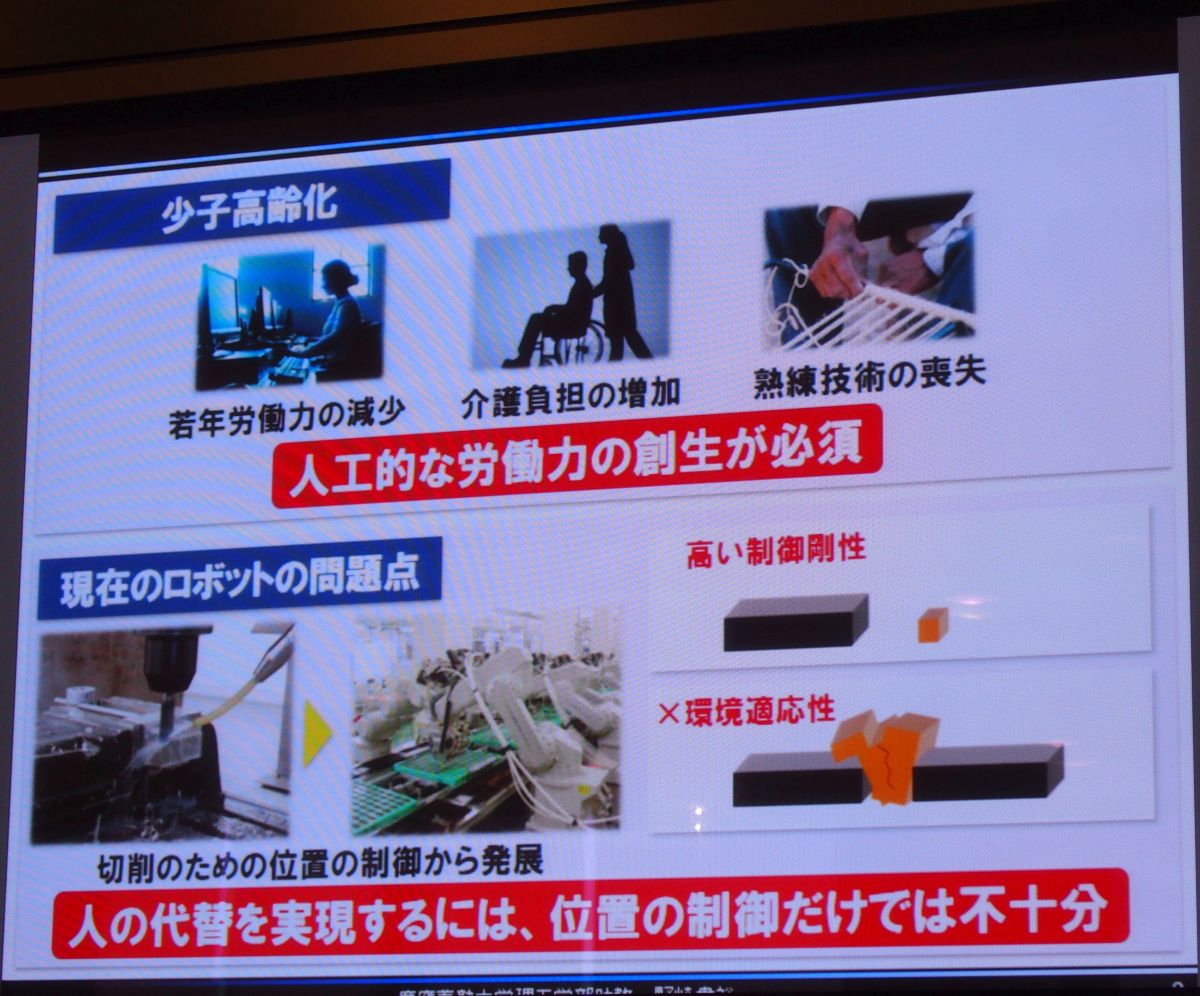
世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決 現在のロボットの問題点は、極めて高い制御剛性に対して、環境適応性がないことだ(クリックで拡大) 出典:慶應義塾大学 記事に戻る 朴尚洙,MONOist
{kind=link}