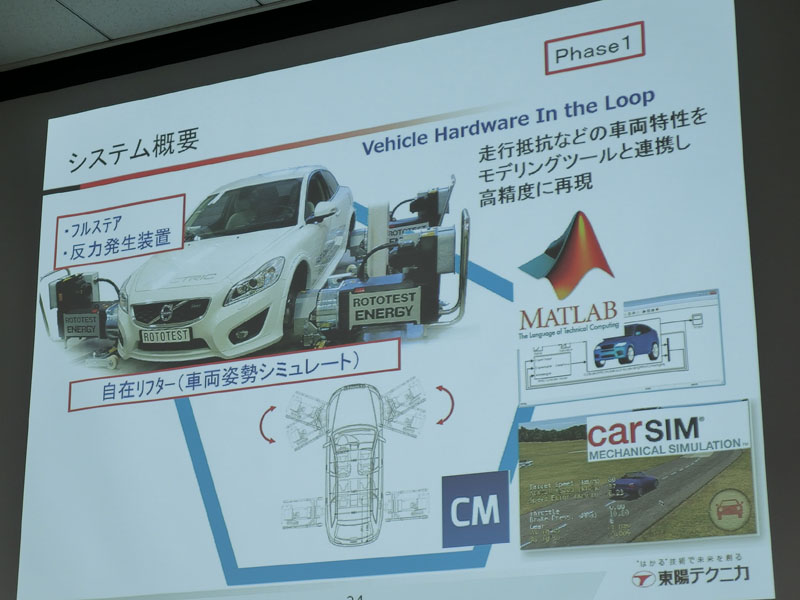
シャシーダイナモでどこまで公道走行を再現できるか、東陽テクニカの挑戦 第1段階はコーナリングを含めて公道走行を再現できるシステムの構築(左)。実走行でのセンサーのデータを反映したテストや、ドライビングロボットの適用を目指すのが第2段階となる(右)(クリックして拡大) 出典:東陽テクニカ 記事に戻る 齊藤由希,MONOist
{kind=link}